ロボットの運動制御

軟弱地面歩行
多自由度を持つ複雑な機械システムとして人間型ロボット(ヒューマノイドロボット)を題材とし,それが人間や環境と効果的に相互作用するための運動制御を模索しています.従来,ヒューマノイドロボットは,人間の代替として,あるいは人間と協調して作業することが期待されてきました.困難な状況として軟弱地面における運動技術を開発しています.主に北海道大学大学院情報科学研究院知能ロボットシステム研究室との共同研究です.
泥濘地における二足歩行
泥上歩行実験
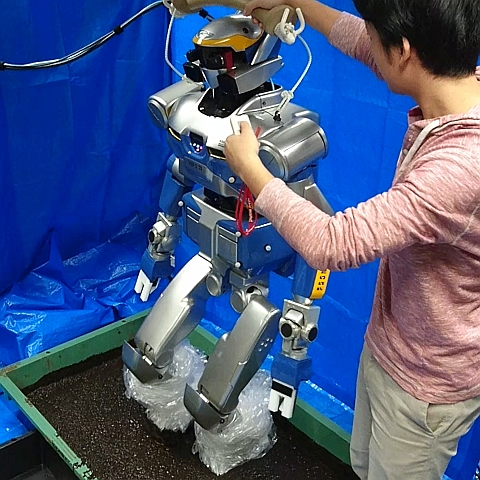
泥上歩行実験(等身大ロボット):
等身大ロボットで泥上歩行を安定に継続するための制御手法を開発しています.
泥上歩行シミュレーション
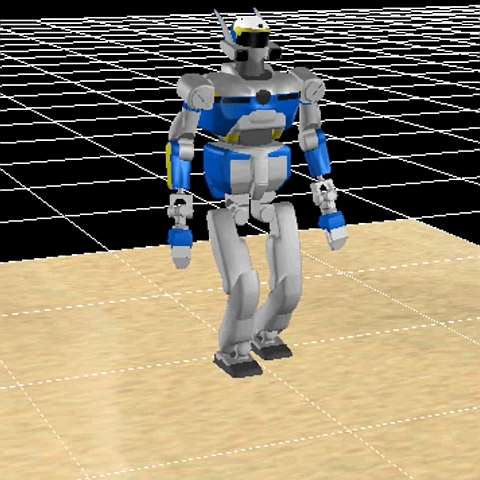
泥上歩行シミュレーション:
泥濘地モデルを動力学シミュレータに統合し,ヒューマノイドロボットの泥濘地における歩行時の挙動を模擬するシミュレータを開発しました.
泥濘地における接地力学モデルの構築
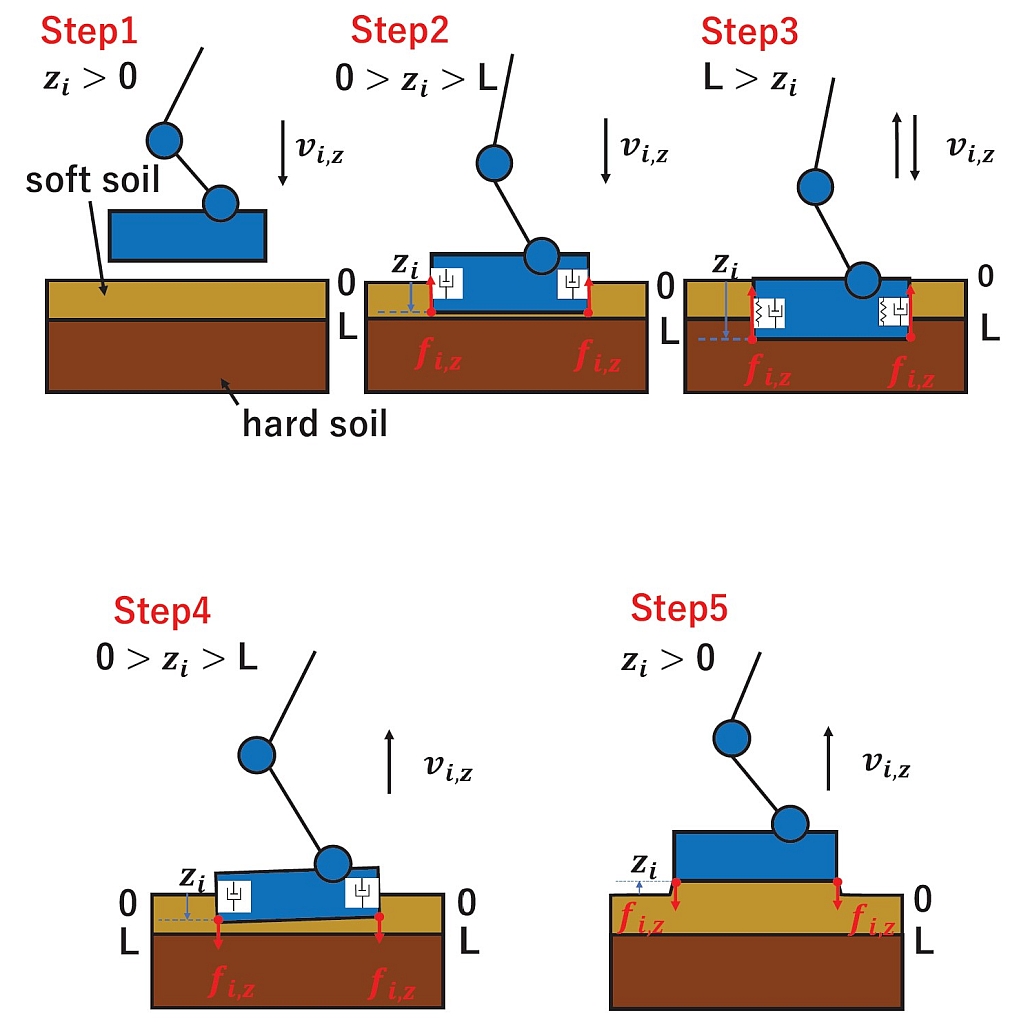
水田のように,水分が多く緩い層と比較的固い層の2層からなる泥濘地において,足の着地から離地までの間に足に作用する力のモデル化を試み,実験的に評価しました.
砂地における二足歩行
砂上歩行実験
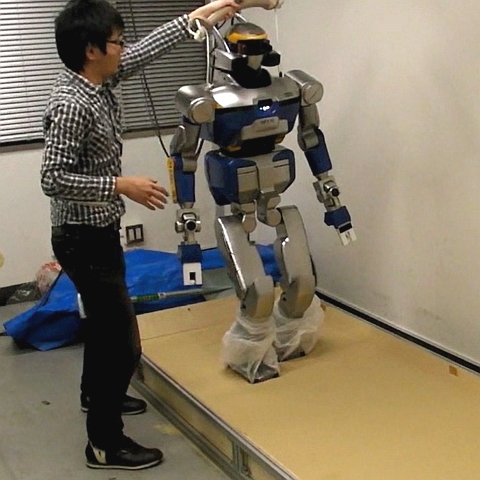
砂上歩行実験(等身大ロボット):
本実験として,等身大ロボットで砂上歩行を安定に継続するための制御手法の検証が行われました.実験室内の砂場において目標通り1mの安定歩行のうえ直立停止が達成されました.

砂上歩行実験(小型ロボット):
予備実験として,小型ロボットで砂上歩行を安定に継続するための制御手法の検証が行われました.砂の上で前進後退や左右旋回などを数十歩に渡って継続し,停止指令により直立停止が達成されました.
砂上歩行シミュレーション
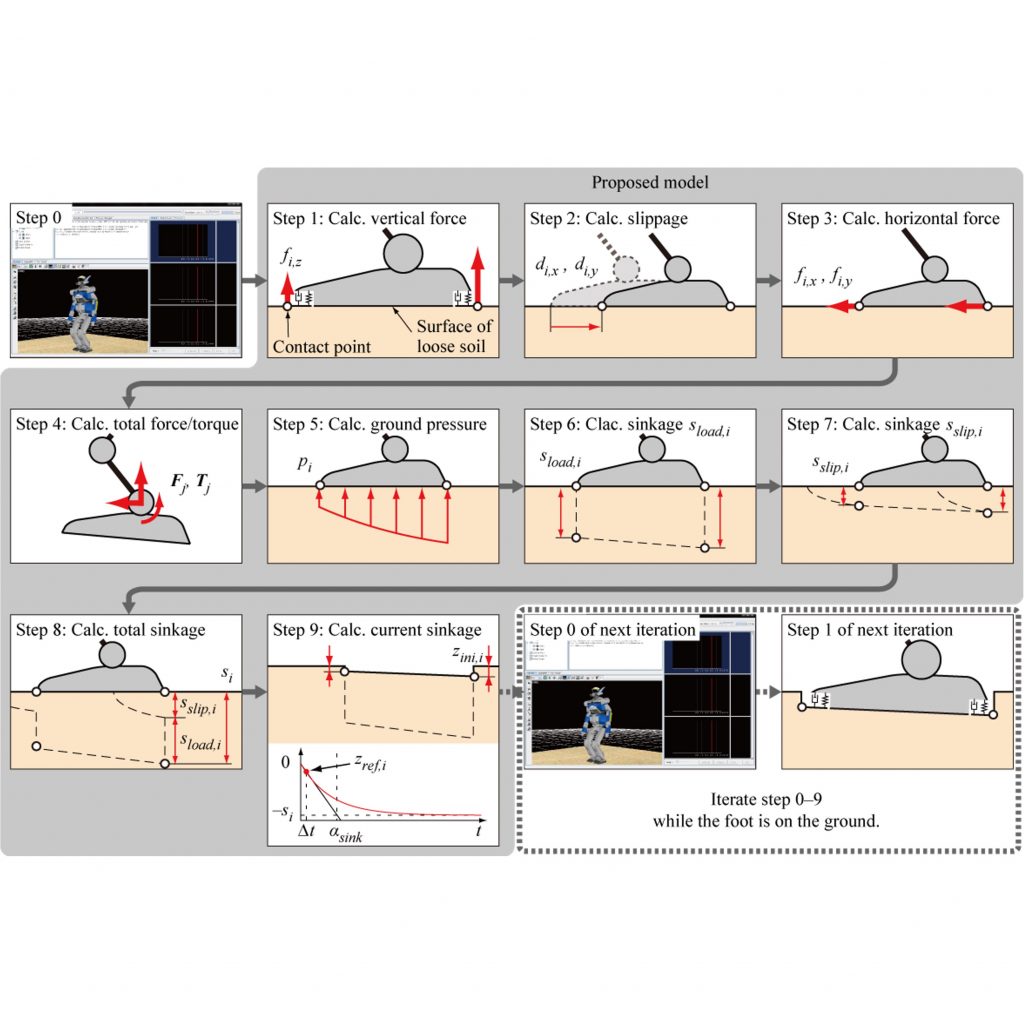
砂地における接地反力と地面変形のモデル化(軟弱地面モデルの構築):
砂の沈下特性のモデリングに基づく知見と動力学シミュレータの枠組みを踏まえて,歩行ロボットの足と砂地との相互作用、すなわち,足にどのような接地反力が作用するか,地面はどのように変形するかを規定するモデルを構築しました.
砂上歩行シミュレーション:
砂の軟弱地面モデルを動力学シミュレータに統合し,ヒューマノイドロボットの砂地における歩行時の挙動を模擬するシミュレータを世界に先駆けて開発しました.
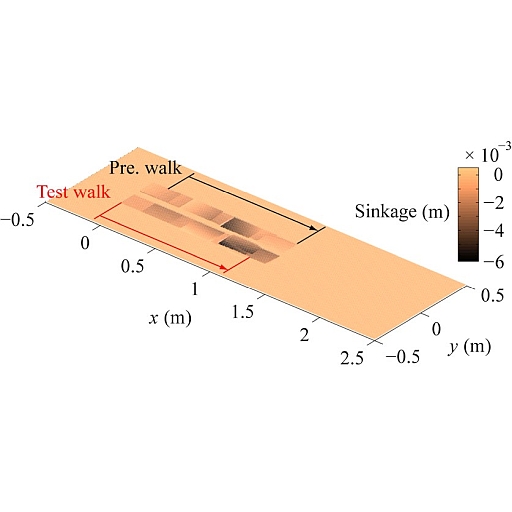
足跡の影響を考慮した砂上歩行シミュレーション:
軟弱地面において過去に残した足跡を地形として記録することで,接地反力や機体姿勢への影響を考慮できるようにしました.この機能は,初期地形の設定としても機能します.
砂の沈下特性のモデリング
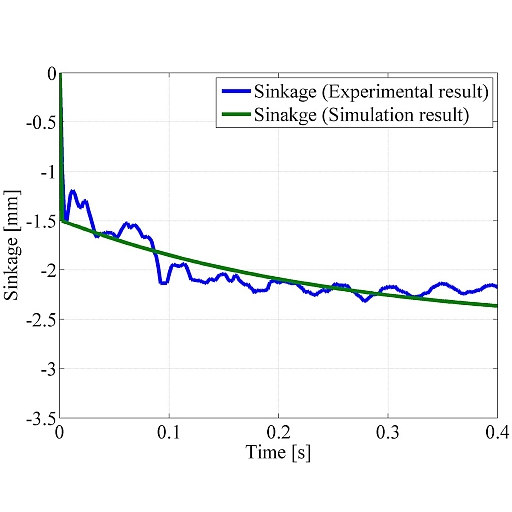
砂の動的沈下特性のモデリング:
砂上において足底サイズの平板が衝撃的に荷重を加えられた際の沈下挙動を計測,定式化しました.
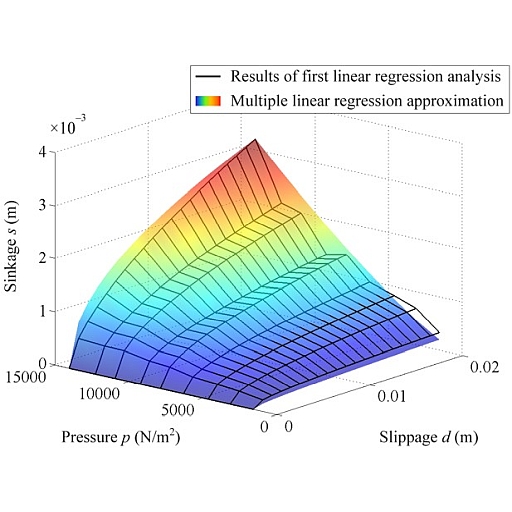
砂のスリップ沈下特性の同定:
地盤と機械との相互作用を扱うテラメカニクスの理論の基づき,砂上において足底サイズの平板が荷重を加えられながら牽引された際の沈下傾向を計測,定式化しました.
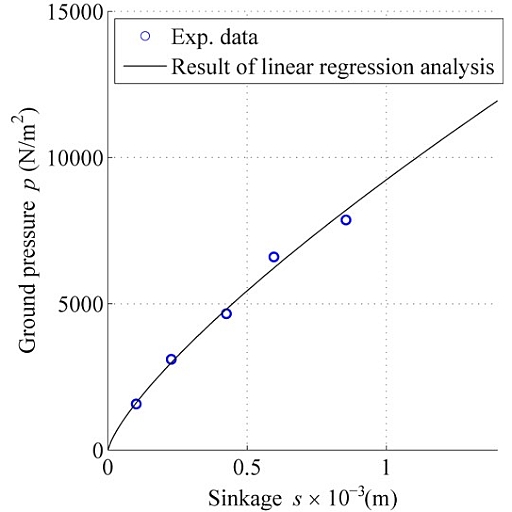
砂の荷重沈下特性の同定:
地盤と機械との相互作用を扱うテラメカニクスの理論の基づき,砂上において足底サイズの平板に荷重を加えた際の沈下傾向を計測,定式化しました.
協調物体搬送
複数のヒューマノイドロボットが協調して一つの物体を運ぶためのアルゴリズムを開発しました.物体の動きを基準として,それを実現するための各ロボットの動作を生成,実行するとともに,機体の安定も維持されます.2台以上の機体にも対応可能です.
インパクト動作
インパクト動作を利用した作業動作
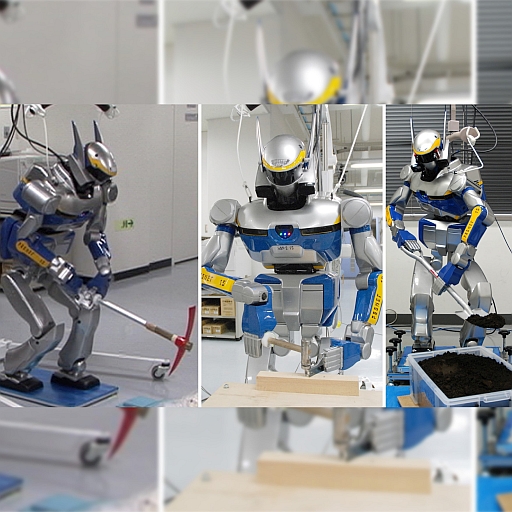
ヒューマノイドロボットのアクチュエータは人間の筋肉と比べて出力が低く,作業能力が劣ります.そこで,釘打ちのように予備動作の勢い(運動量)を活用することで衝撃力として大きな力を取り出すことを試みました.所望の衝撃力から予備動作と事後動作を生成するとともに,環境との衝突による外乱に対する機体の安定維持を考慮できる動作計画手法を開発しました.同手法を活用して,釘打ちやつるはし振り,スコップによる掘削などを試みました.
インパクト動作のための人間の巧みさの解析

衝撃力の最大化を指標とするインパクト動作生成の最適化問題に対して,身体の力を抜きつつも効果的に打撃を行う人間の運動知能を明らかにし,その知見をインパクト動作生成手法に役立てることを目指して,人間の動作計測を行いました.