プロジェクト

現在のプロジェクト
看護支援


ロボットの運動制御
触れる情報空間
 |  | |
| 触れる空中映像システムの開発 | 6自由度空中力覚提示装置の開発 |
過去のプロジェクト
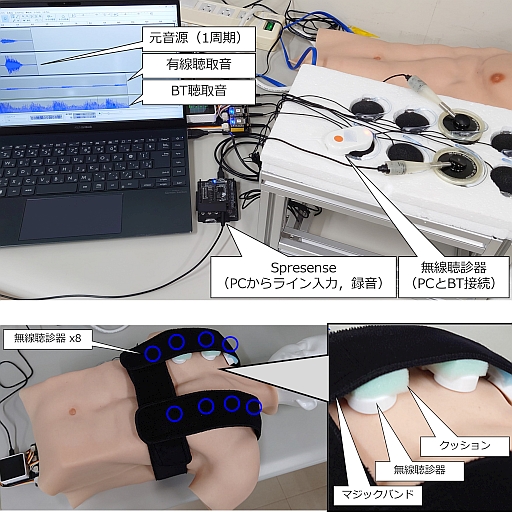 |  | 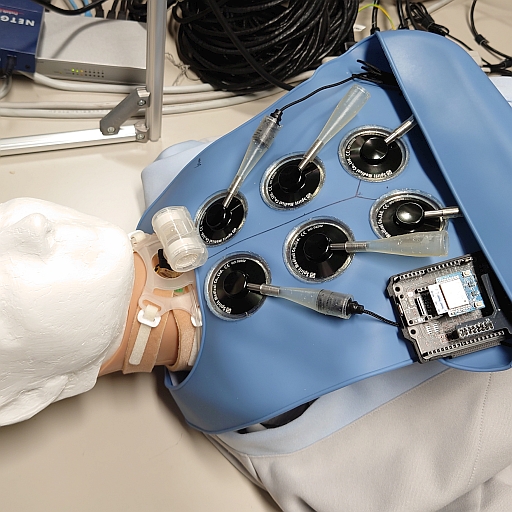 |
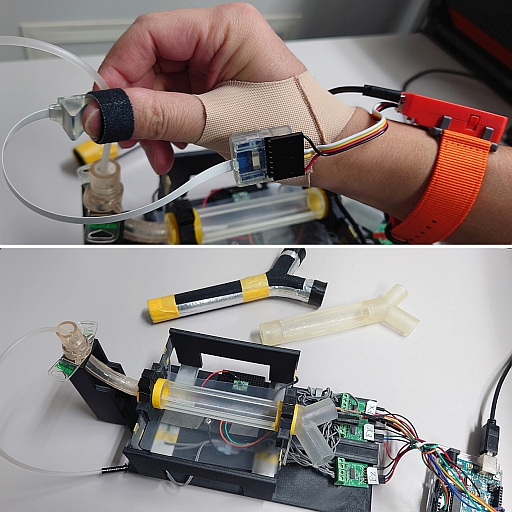
| 聴診センサアレイの無線化 | 気管内吸引要否判別・喀痰貯留位置推定技術の開発 | 常時多点自動聴診システムの開発 |
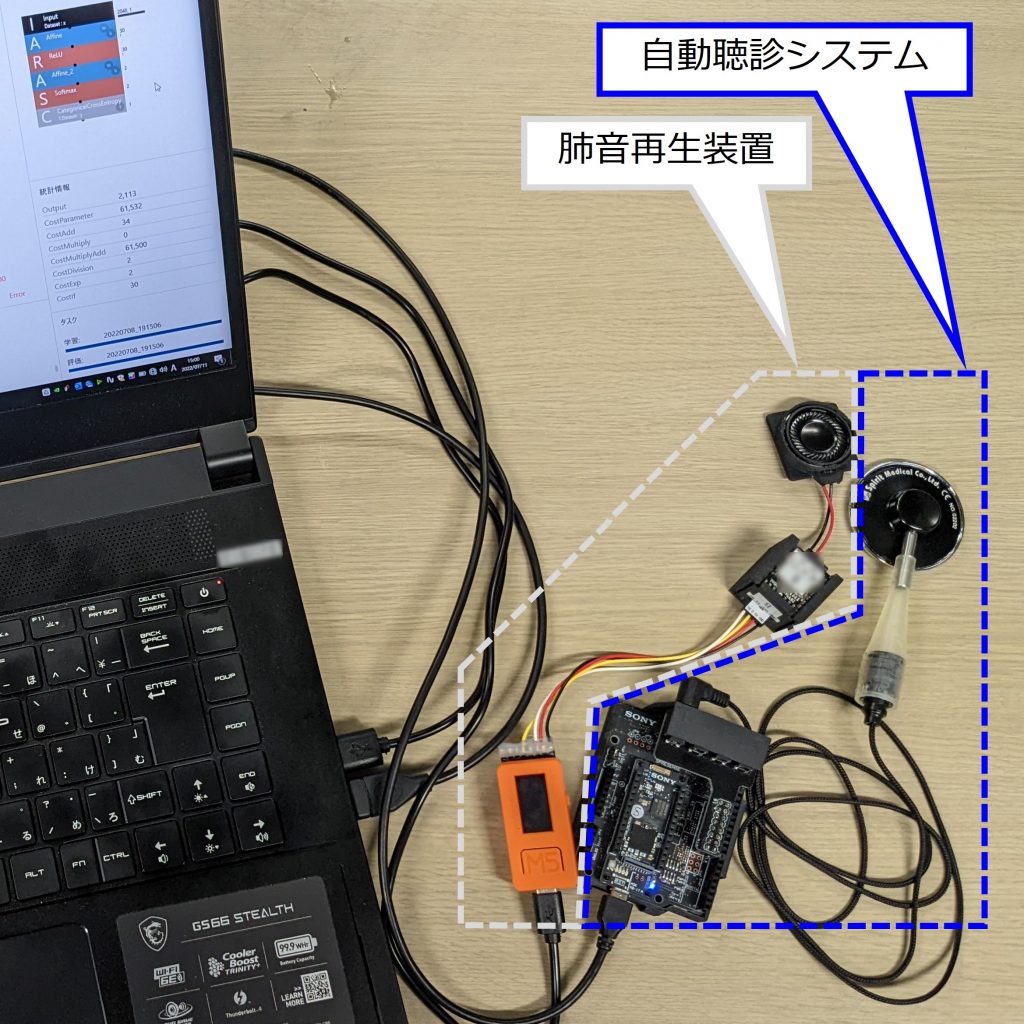 | ||
| エッジデバイスによる自動聴診技術の開発 | ||
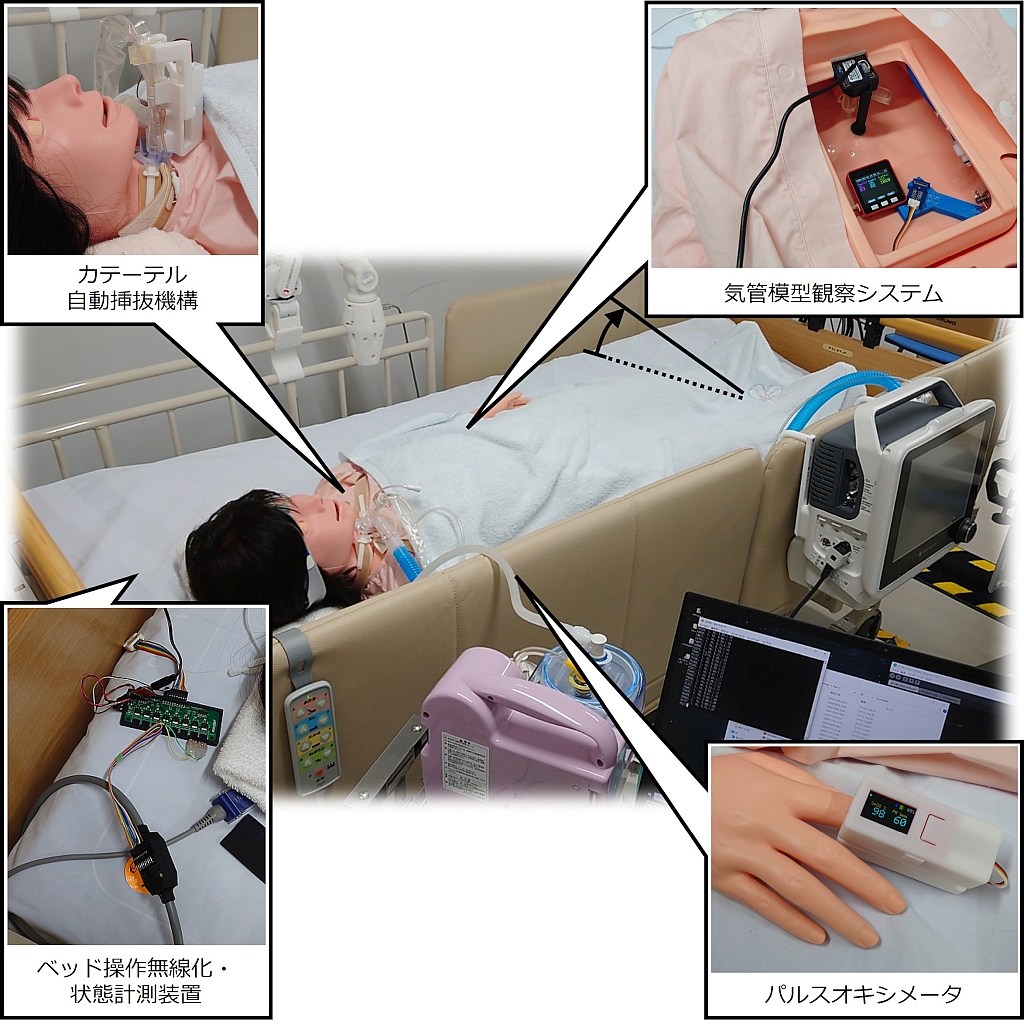 | 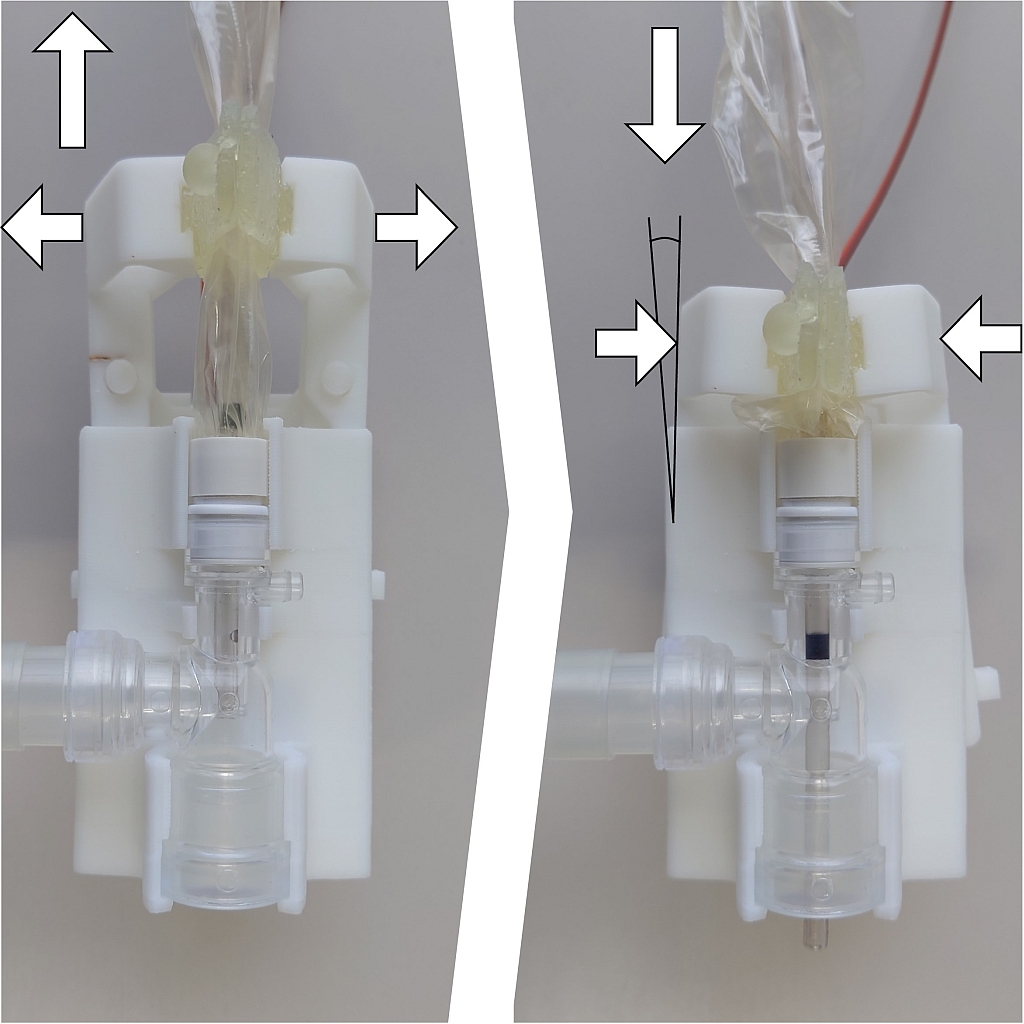 | 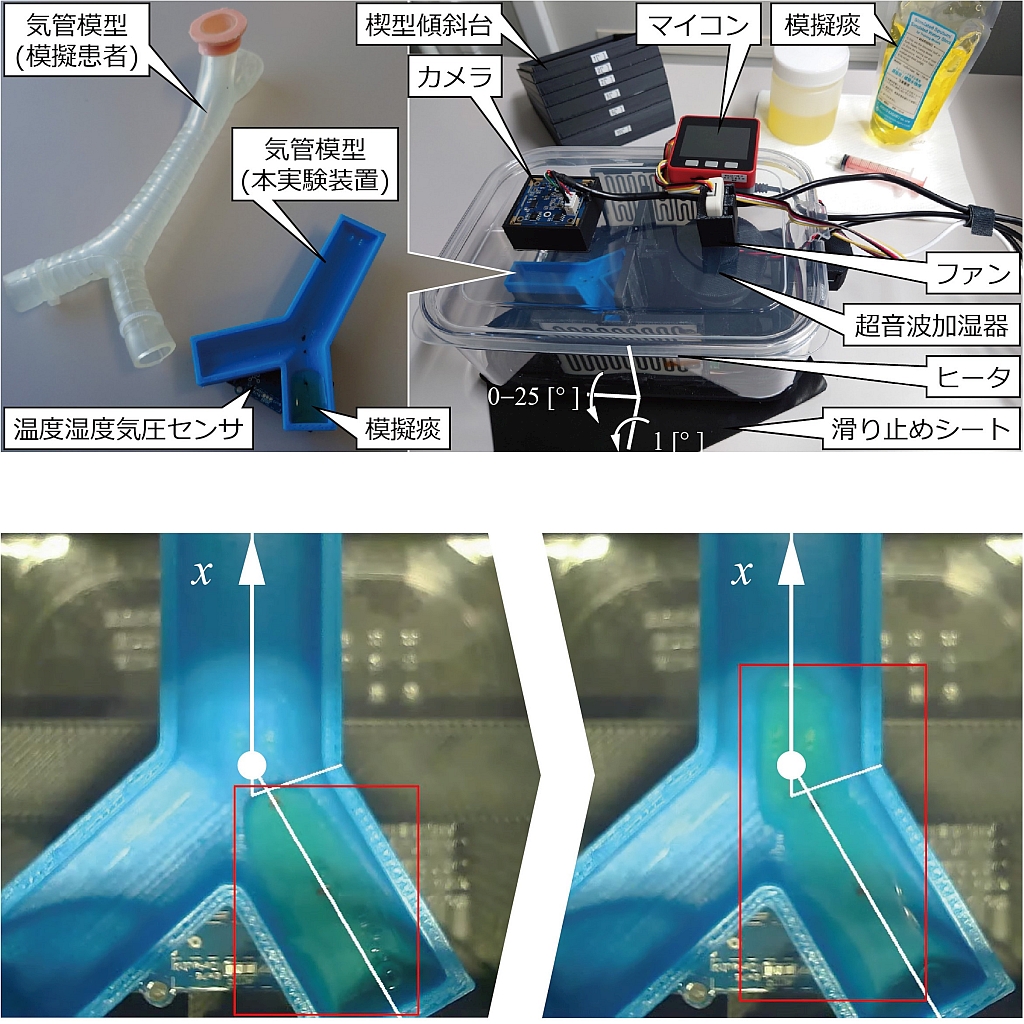 |
| 看護(特に気管内吸引)を部分的に自動化するシステムの開発 | カテーテル自動挿抜機構の開発 | 自動体位変換による体位ドレナージの評価 |
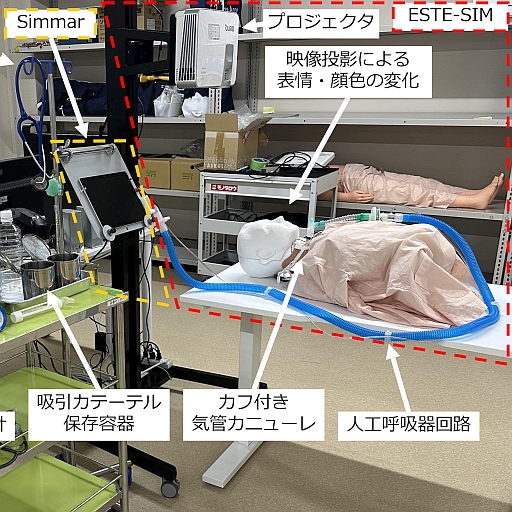 | 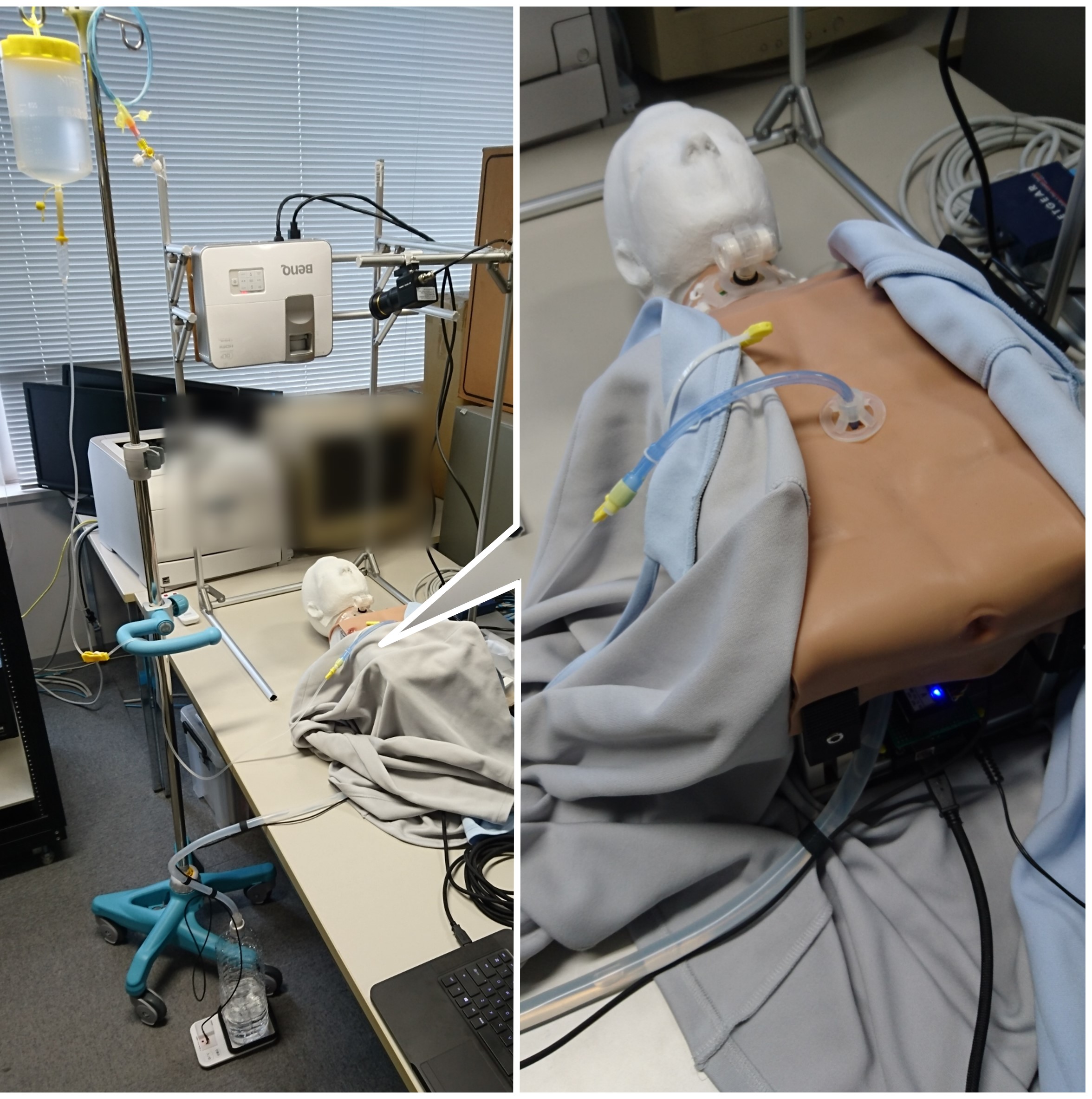 |  |
| ESTE-SIM+人工呼吸器シミュレータSimmar | ESTE-SIM+経管栄養訓練機能 | 気管模型の素材による体感の評価 |
 | 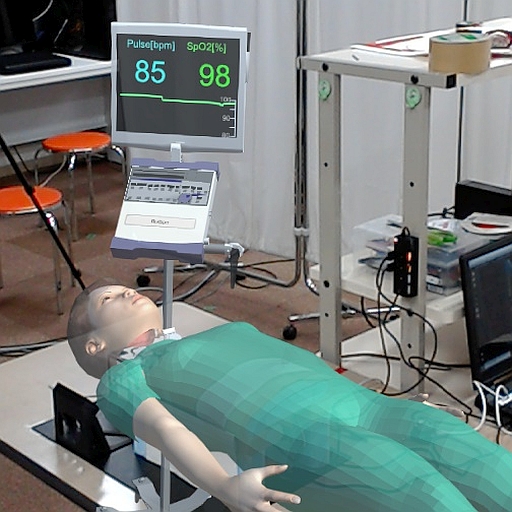 | 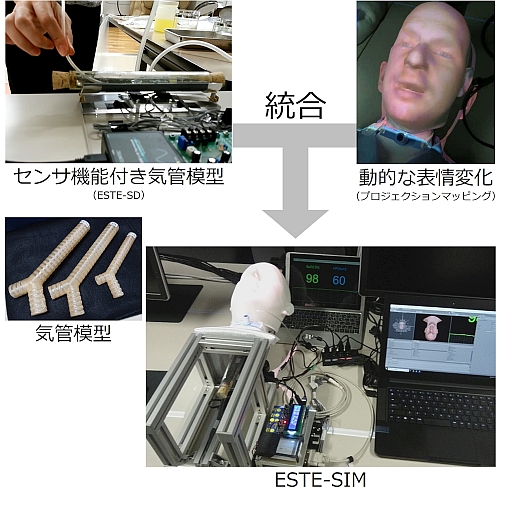 |
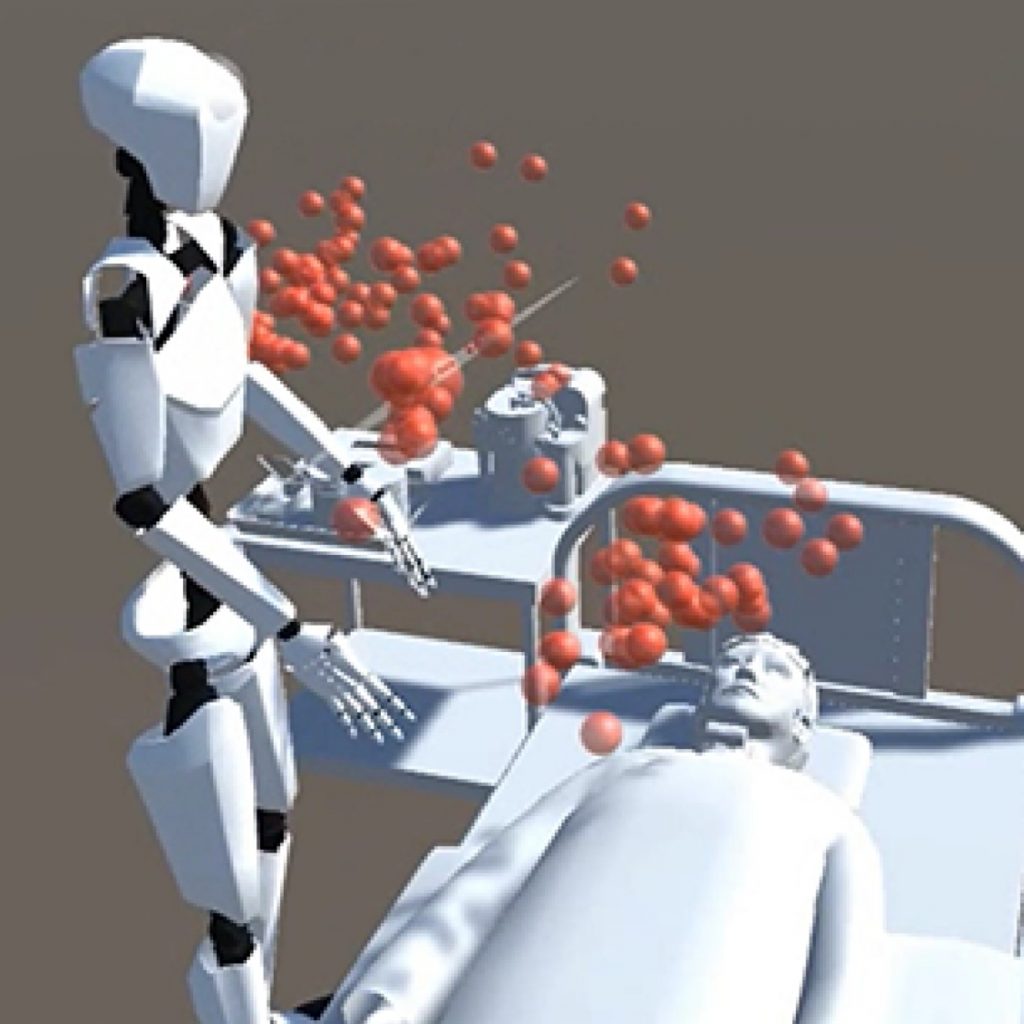
| ESTE-Holoによる気管内吸引手技の可視化 | AR型看護教材の開発(ESTE-Holo) | 生体反応を呈する患者シミュレータの開発(ESTE-SIM) |
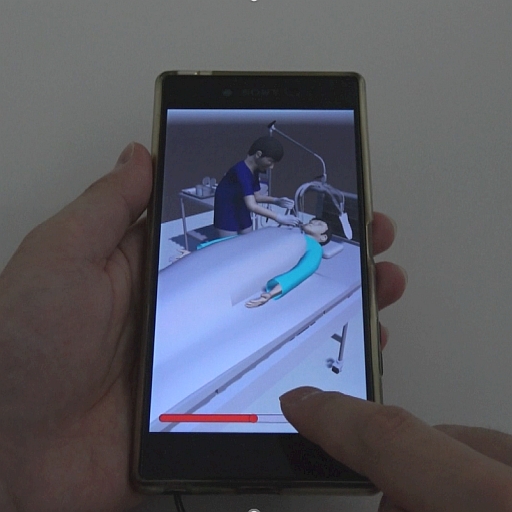 |  |  |
| モバイル型看護教材の開発(ESTE-mobile) | 三次元的な注視点の可視化(空間的視点ヒートマップ) | 力覚フィードバックを伴うVR型看護教材 |
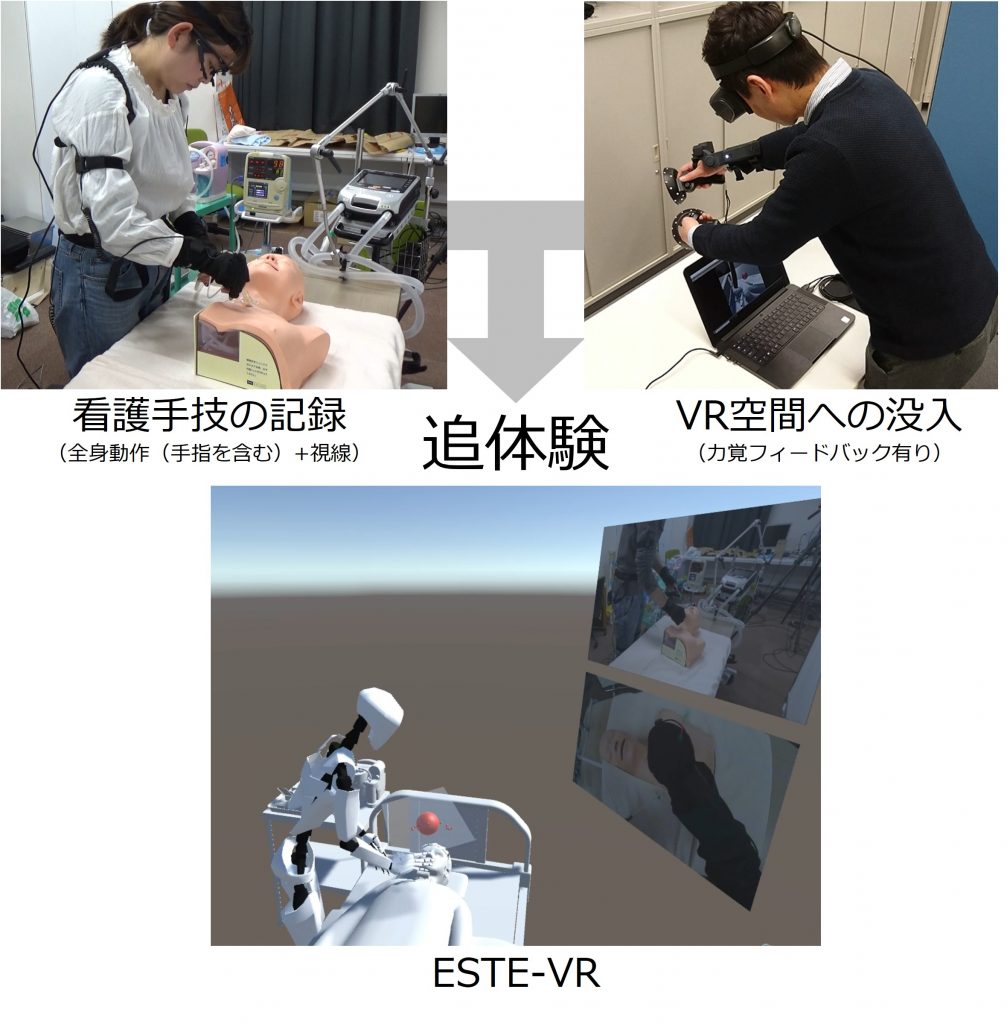 |  |  |
| 熟練者の手技を追体験するVR型看護教材の開発(ESTE-VR) | 看護手技(動作と視線)の計測 | ビデオシースルーHMDによるAR看護シミュレーションの技術評価 |
| 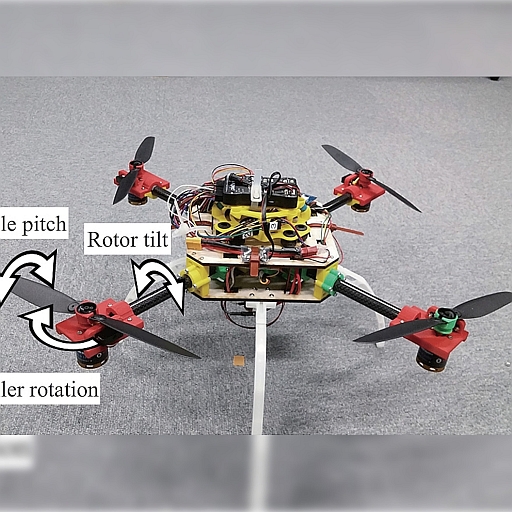 |  |
| クアッドチルトロータドローンによる遷移飛行と壁面走行 | 可変ピッチクアッドチルトロータドローンの開発 | 10g級トイドローンの自動操縦システムの開発 |
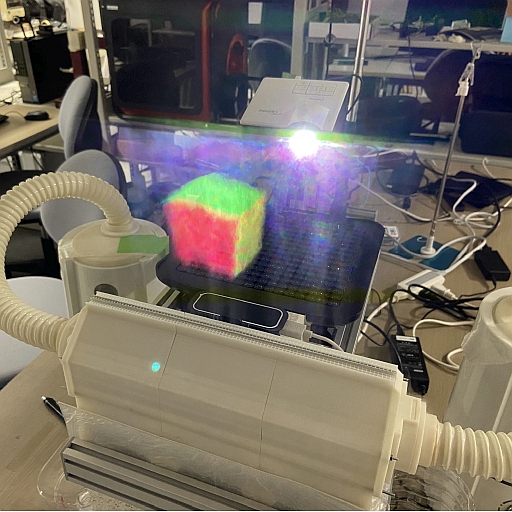 | 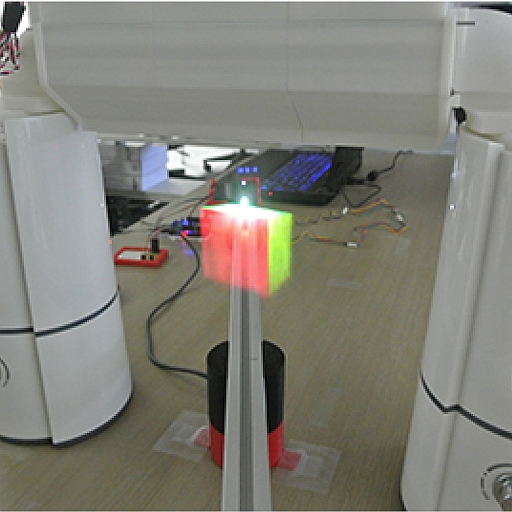 |  |
| 空中超音波触覚を伴った多視点視可能な空中映像の提示 | ミストスクリーンによる空中映像の多視点化 | ミストスクリーン形状による散乱特性と視野角の特性調査 |
|  |  |
| 触感(硬軟感)を伴って触れる空中映像の提示 | 空中映像表示装置の開発(ミストスクリーン) | 多自由度指先触覚提示装置の開発 |
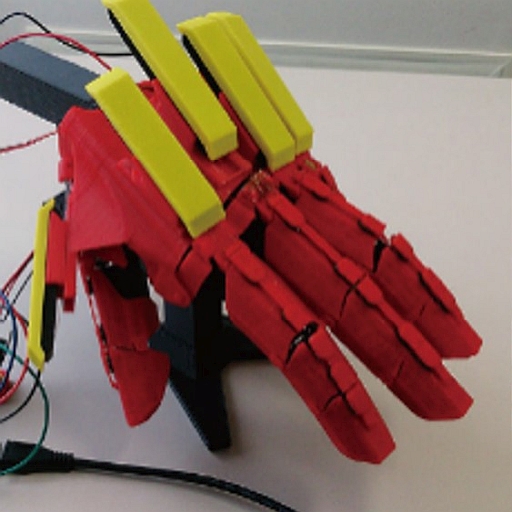 | 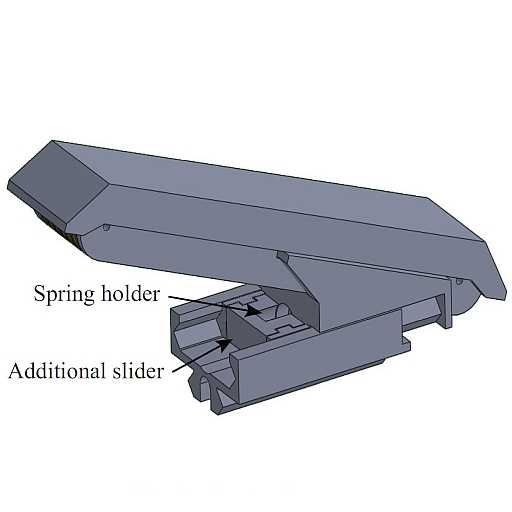 | 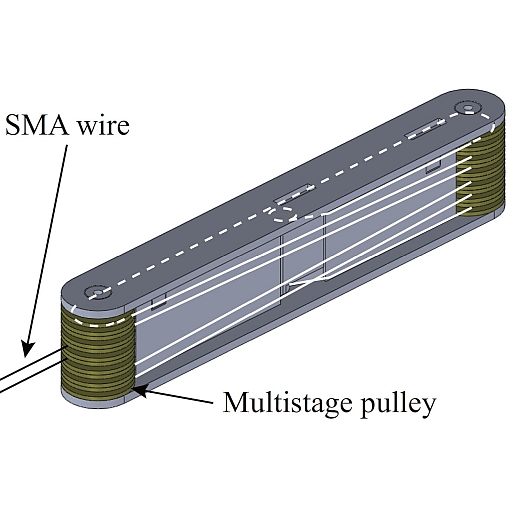 |
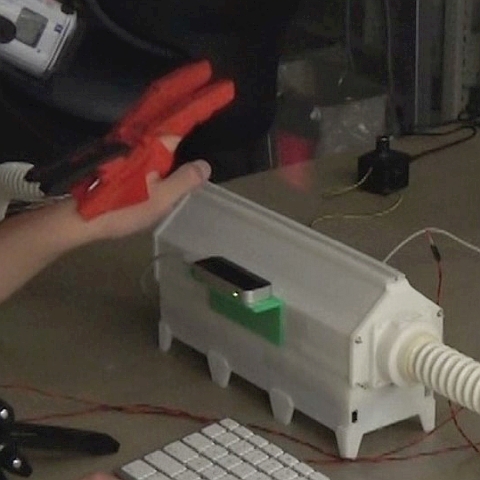
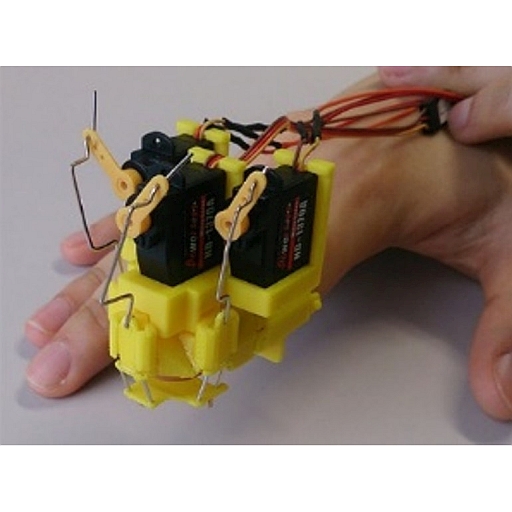
| 手の輪郭を崩さない遭遇型把持力覚提示装置の開発 | 形状記憶合金ワイヤの張力維持兼過負荷防止機構の開発 | 形状記憶合金ワイヤの変位増幅機構の開発 |
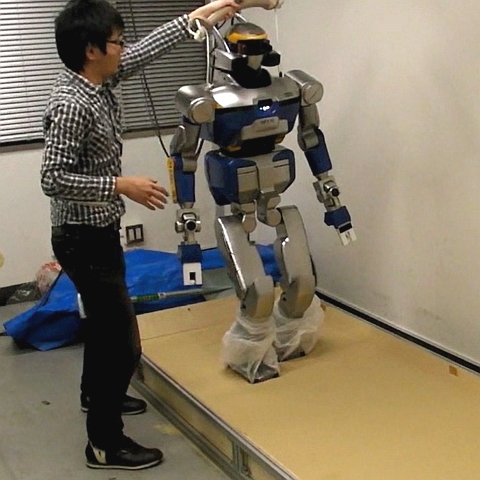 |  | 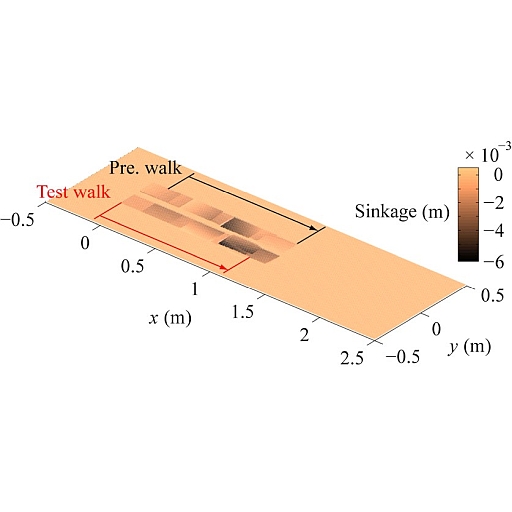 |
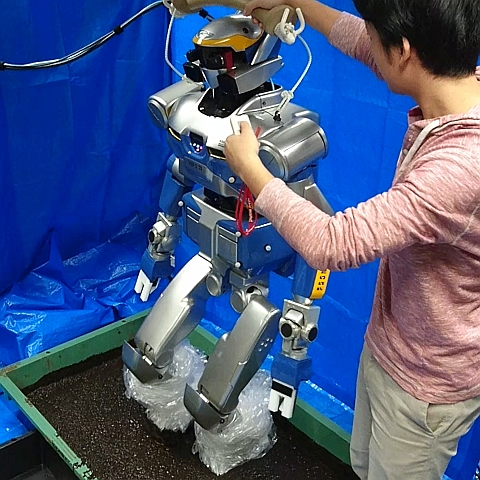
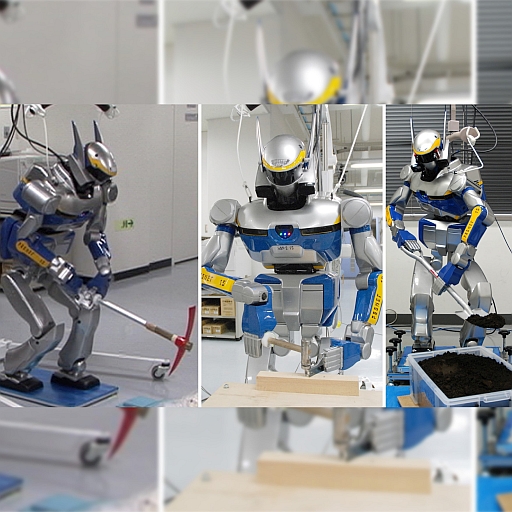
| 軟弱地面歩行制御手法の開発(等身大人型ロボット+砂) | 軟弱地面歩行制御手法の開発(小型人型ロボット+砂) | 足跡の影響を考慮した軟弱地面歩行シミュレーション |
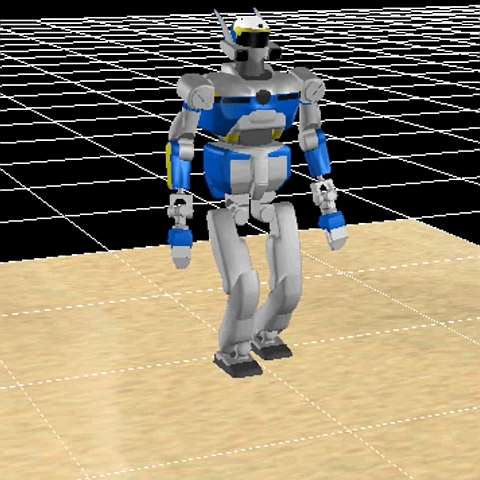 | 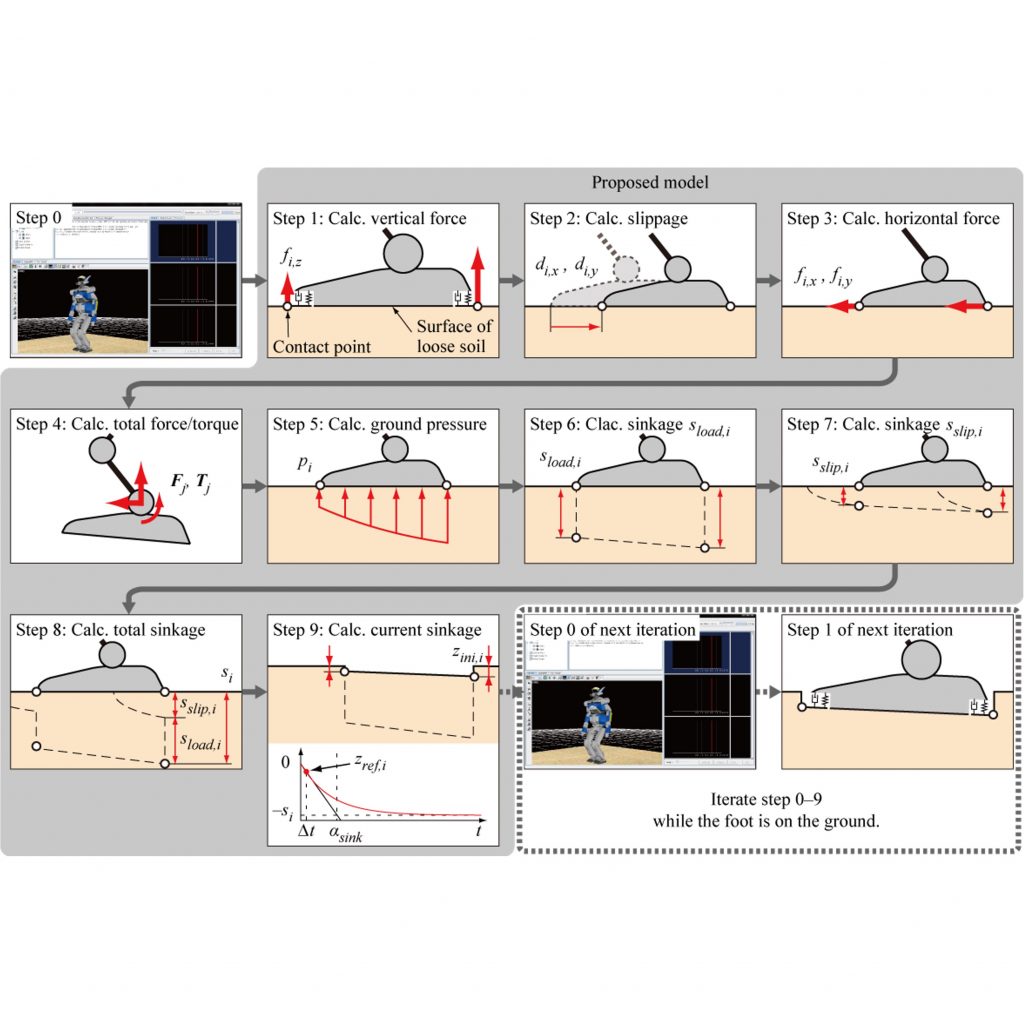 | 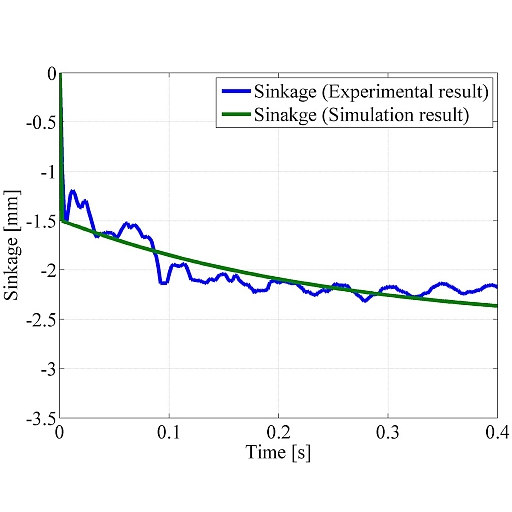 |
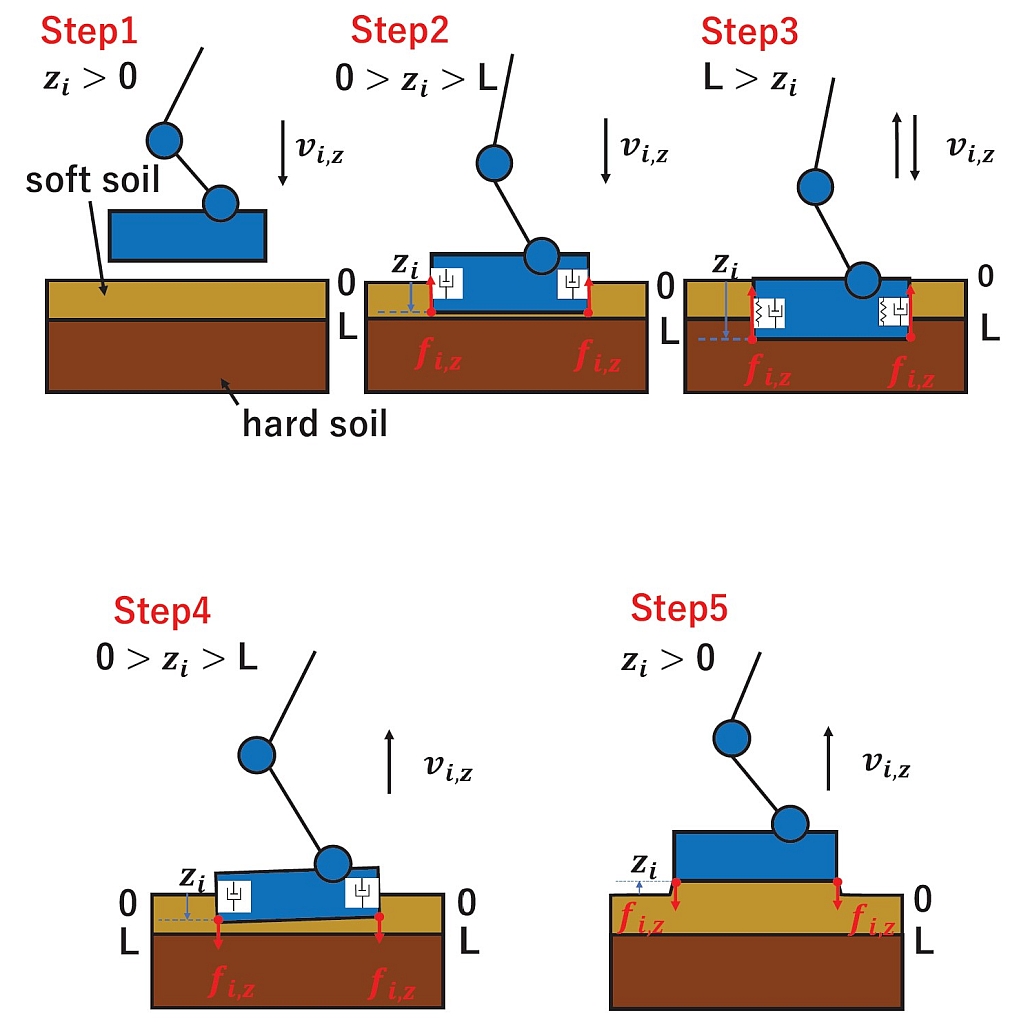
| 軟弱地面歩行の動力学シミュレータの開発 | 軟弱地面モデル(砂)の開発 | 砂の動的沈下特性のモデリング |
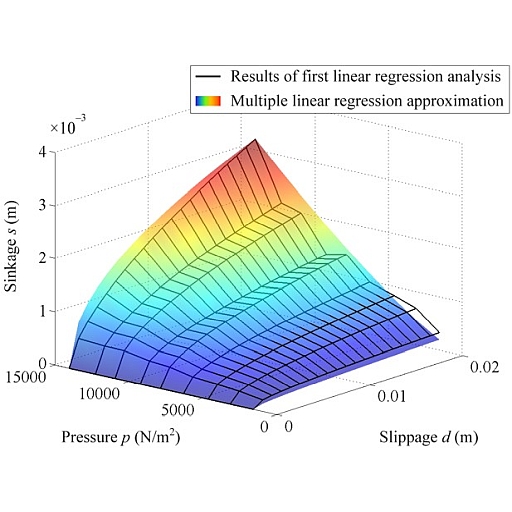 | 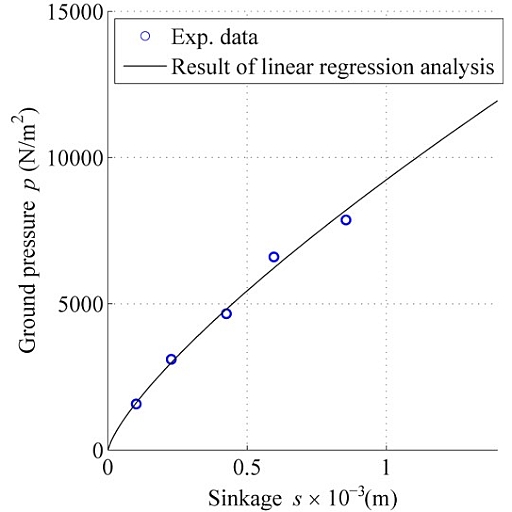 | |
| 砂のスリップ沈下特性の同定 | 砂の荷重沈下特性の同定 | |
 |  | |
| 協調物体搬送 | インパクト動作のための人間の巧みさの解析 | インパクト動作を利用した作業 |
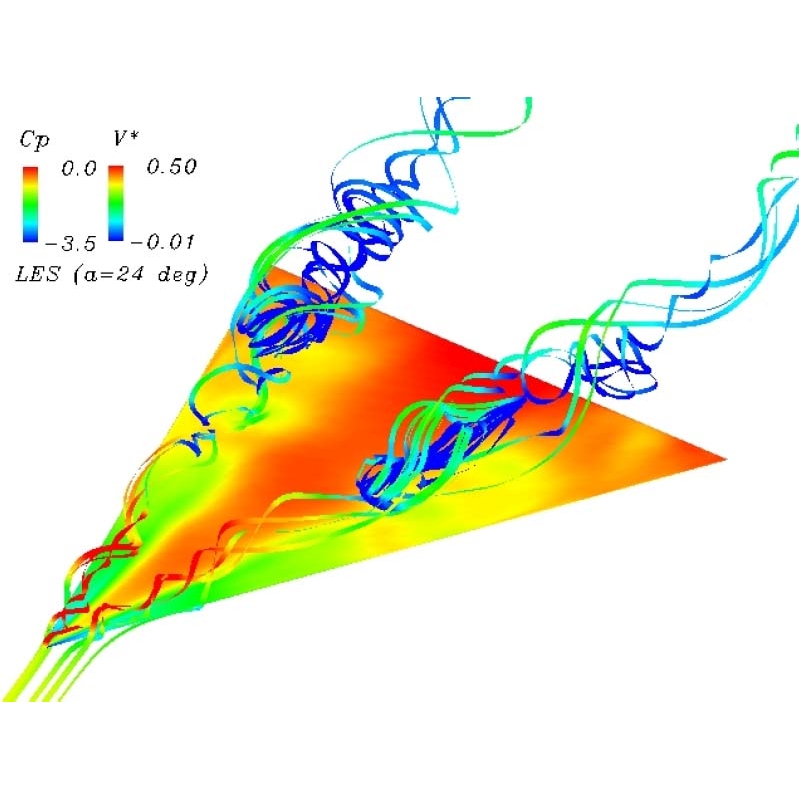 |  | |
| デルタ翼周りの渦崩壊現象のCFD解析 | 管内流れの渦崩壊現象のCDF解析 |